 首页
首页三. 构建策略网络(Policy Network)
正如前文所述,我们将使用神经网络作为 “智能体的大脑”,即策略网络。换句话说,它的任务是根据当前环境的状态(state vector),输出一个动作的概率分布,告诉智能体下一步该怎么做。
下面是一个简单的实现:它接收状态向量作为输入,输出 3 个独立动作(对应三个推进器)的概率分布。
- 启动主推进器
- 启动左推进器
- 启动右推进器
def state_to_array(state):
"""Helper function to convert DroneState dataclass to numpy array"""
data = np.array([
state.drone_x,
state.drone_y,
state.drone_vx,
state.drone_vy,
state.drone_angle,
state.drone_angular_vel,
state.drone_fuel,
state.platform_x,
state.platform_y,
state.distance_to_platform,
state.dx_to_platform,
state.dy_to_platform,
state.speed,
float(state.landed),
float(state.crashed)
])
return torch.tensor(data, dtype=torch.float32)
class DroneGamerBoi(nn.Module):
def __init__(self, state_dim=15):
super().__init__()
self.network = nn.Sequential(
nn.Linear(state_dim, 128),
nn.LayerNorm(128),
nn.ReLU(),
nn.Linear(128, 128),
nn.LayerNorm(128),
nn.ReLU(),
nn.Linear(128, 64),
nn.LayerNorm(64),
nn.ReLU(),
nn.Linear(64, 3),
nn.Sigmoid()
)
def forward(self, state):
if isinstance(state, DroneState):
state = state_to_array(state)
return self.network(state)实际上,我没有采用 “2³=8 种离散动作组合” 的方案(毕竟三个推进器,每个都可以“开”或“关”,理论上会形成 8 种动作可能)。相反,我把问题简化成了对三个独立推进器分别做决策,并使用 伯努利采样(Bernoulli sampling) 来决定是否激活每个推进器。这种简化让优化更简单 —— 因为每个推进器的决策是独立的,而不需要在一个大的类别里纠结哪个组合更好(至少我是这么认为的,可能不对,但确实有效!)。
四. 用策略梯度(Policy Gradient)训练策略
学习策略:何时更新网络?
我早期曾被一个问题困住:“到底是每执行一个动作就立刻更新一次策略,还是等整个 episode(完整的一轮任务)跑完之后,再统一更新?”事实证明,这个选择对训练效果影响巨大。
如果仅根据单个动作的奖励来优化策略,会导致 “高方差问题”—— 简单说,训练信号充满噪声,梯度方向混乱无章!所谓 “高方差”,是指优化算法在更新策略网络参数时,接收到的梯度信号相互矛盾:同样的动作,在略有不同的状态下,可能会得到完全相反的梯度方向。这会导致训练缓慢,甚至完全停滞。
我们有三种策略更新方式:
- 每个动作更新(Per-Step Updates)
无人机启动一次推进器,获得少量奖励,然后立即更新整个策略。这就像每投一次篮球,就立刻调整投篮姿势 —— 反应过度了!一次 “运气好” 的动作(比如偶然获得更高奖励)不代表智能体做得对,一次 “运气差” 的动作也不代表做得错。此时的训练信号噪声太大。
我的第一次尝试:我早期用了这种方式,结果无人机只会随机乱晃,偶尔靠运气做出一个能多拿点奖励的动作,就立刻 “过拟合” 到这个动作上,之后反复尝试复现,却不断坠毁。那场景看得人难受 —— 就像看一个人从纯粹的巧合里学到错误的教训,一遍又一遍地重蹈覆辙。
- 每回合更新(Per-Episode Updates)
这种方式好多了!让无人机完整尝试一次着陆(无论成功还是坠毁),看完整个过程后再更新策略。这就像打完一局游戏后,复盘思考需要改进的地方。至少现在我们能看到 “动作的完整后果” 了。但问题在于:如果这次着陆只是运气好(或运气差)呢?我们仍然只依赖 “单个数据点” 来学习。
- 多次回合后批量更新(Multi-Episode Batch Updates)
这是最优方案。我们同时运行多次(我用了 6 次)无人机着陆尝试,看完所有尝试的结果后,根据 “平均表现” 更新策略。有些尝试可能运气好,有些可能运气差,但取平均值后,我们能更清楚地知道 “到底什么方法真的有效”。虽然这种方式对电脑算力要求较高,但只要能运行,效果远好于前两种。当然,这方法并非最优,但容易理解和实现 —— 还有其他更好的方法。
以下是在无人机游戏中收集多个回合的代码:
def collect_episodes(client: DroneGameClient, policy: nn.Module, max_steps=300):
"""
Collect episodes with early stopping
Args:
client: The game's socket client
policy: PyTorch module
max_steps: Maximum steps per episode (default: 300)
"""
num_games = client.num_games
# Initialize storage
all_episodes = [{'states': [], 'actions': [], 'log_probs': [], 'rewards': [], 'done': False}
for _ in range(num_games)]
# Reset all games
game_states = [client.reset(game_id) for game_id in range(num_games)]
step_counts = [0] * num_games # Track steps per game
while not all(ep['done'] for ep in all_episodes):
# Batch active games
batch_states = []
active_game_ids = []
for game_id in range(num_games):
if not all_episodes[game_id]['done']:
batch_states.append(state_to_array(game_states[game_id]))
active_game_ids.append(game_id)
if len(batch_states) == 0:
break
# Batched inference
batch_states_tensor = torch.stack(batch_states)
batch_action_probs = policy(batch_states_tensor)
batch_dist = Bernoulli(probs=batch_action_probs)
batch_actions = batch_dist.sample()
batch_log_probs = batch_dist.log_prob(batch_actions).sum(dim=1)
# Execute actions
for i, game_id in enumerate(active_game_ids):
action = batch_actions[i]
log_prob = batch_log_probs[i]
next_state, _, done, _ = client.step({
"main_thrust": int(action[0]),
"left_thrust": int(action[1]),
"right_thrust": int(action[2])
}, game_id)
reward = calc_reward(next_state)
# Store data
all_episodes[game_id]['states'].append(batch_states[i])
all_episodes[game_id]['actions'].append(action)
all_episodes[game_id]['log_probs'].append(log_prob)
all_episodes[game_id]['rewards'].append(reward['total'])
# Update state and step count
game_states[game_id] = next_state
step_counts[game_id] += 1
# Check done conditions
if done or step_counts[game_id] >= max_steps:
# Apply timeout penalty if hit max steps without landing
if step_counts[game_id] >= max_steps and not next_state.landed:
all_episodes[game_id]['rewards'][-1] -= 500 # Timeout penalty
all_episodes[game_id]['done'] = True
# Return episodes
return [(ep['states'], ep['actions'], ep['log_probs'], ep['rewards'])
for ep in all_episodes]最大化与最小化的难题
在传统深度学习(监督学习)中,我们的目标是 最小化损失函数:
我们希望沿着梯度方向“下山”,让损失越来越小(预测越来越准)。
但在强化学习中,我们的目标是 “最大化总奖励”!核心目标是:
问题来了:现有的深度学习框架(如 PyTorch、TensorFlow)是为 “最小化” 设计的,不是为 “最大化” 设计的。那么,怎么把 “最大化奖励” 转换成 “最小化损失” 呢?
简单技巧:最大化 J(θ) 等价于最小化它的相反数(即 J (θ) 的负值),Maximize J(θ)=Minimize −J(θ)
因此,我们的损失函数变成了:
这样一来,梯度下降(gradient descent) 实际上就会在“奖励地形”上向上爬坡(更像是“梯度上升”)。 因为我们是在最小化“负奖励”,等价于最大化“正奖励”。
REINFORCE 算法(策略梯度的经典实现)
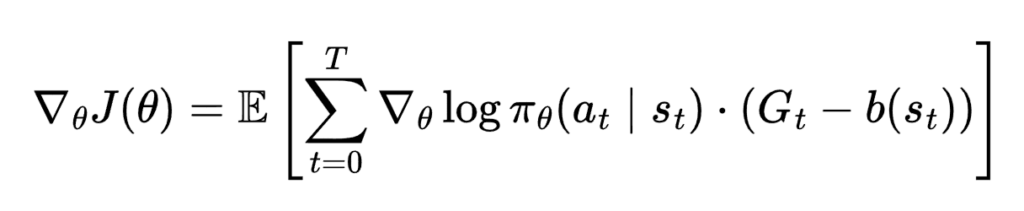
策略梯度定理(Policy Gradient Theorem, Williams, 1992)告诉我们如何计算 “期望奖励” 的梯度:

(我知道这公式看起来吓人,但只要理解核心逻辑,就会发现它其实很简洁!)
其中:
- πθ(at∣st):目标函数 J (θ) 对网络参数 θ 的梯度(即 “该往哪个方向调整参数,才能让奖励更高”)
- E […]:期望(可以理解为 “平均”)
- logπθ(at|st):在状态 st 下,策略 πθ 选择动作 at 的对数概率
- Gt:从时间步 t 开始的总折扣回报(即 “动作 at 带来的后续总奖励”)
用大白话解释(因为公式太密集):
- 如果动作 at 带来了高回报 Gt(后续总奖励高),就提高这个动作的概率;
- 如果动作 at 带来了低回报 Gt(后续总奖励低),就降低这个动作的概率;
- 梯度告诉我们 “该调整神经网络的权重” 的方向。
引入基准值(Baseline):减少方差
直接使用原始回报 Gt 会导致 “高方差”(梯度噪声大)。我们可以通过引入一个基线函数 b(st ) 来改善这一问题:
最简单的基准值,就是 平均回报(mean return):
这就得到了 “优势值”(Advantage):At = Gt – b
- 优势值为正 → 该动作比平均水平好 → 提高概率;
- 优势值为负 → 该动作比平均水平差 → 降低概率。
为什么这有用?举个例子:与其说 “这个动作得了 100 分”(100 分算好吗?),不如说 “这个动作得了 100 分,而平均只有 50 分”(这就明确是“很好”了)。相对表现比绝对分数更清晰。
我们的实现(带基准值的 REINFORCE 算法)
在无人机着陆代码中,我们用了带基准值的 REINFORCE 算法:
# 1. Collect episodes and compute returns
returns = compute_returns(rewards, gamma=0.99) # G_t with discounting
# 2. Compute baseline (mean of all returns)
baseline = returns_tensor.mean()
# 3. Compute advantages
advantages = returns_tensor - baseline
# 4. Normalize advantages (extra variance reduction)
advantages = (advantages - advantages.mean()) / (advantages.std() + 1e-8)
# 5. Compute loss (note the negative sign!)
loss = -(log_probs_tensor * advantages).mean()
# 6. Gradient descent
optimizer.zero_grad()
loss.backward()
optimizer.step()我们会重复上述循环,直到无人机学会正确着陆(或达到预设的训练次数)。想看完整代码实现,可以查看对应的 notebook 示例!
五. 当前结果(奖励函数缺陷改进)
经过无数小时的奖励函数调整、超参数优化,以及看着无人机以各种 “奇葩方式” 坠毁后,我终于让它 “基本能用” 了!虽然我设计的奖励函数并不完美,但它确实能教会策略网络如何让无人机安全着陆。以下是一次成功的着陆示例:

很酷,对吧?但接下来的情况既有趣又让人沮丧……
顽固的悬停问题:一个根本性局限
即便我改进了奖励函数,加入了 “垂直位置条件”(只有 drone_y > platform_y,即无人机在平台上方时才给正奖励),训练后的策略仍有一个让人头疼的行为:当无人机错过平台时,它会朝着平台下降,但到了平台下方后,就会悬停不动,不再尝试着陆。
我花了一周多时间盯着奖励曲线(还不断修改奖励函数),疑惑为什么 “修复后的” 奖励函数还会导致这种悬停行为。直到我画出 “累积奖励曲线”,才看清了规律 —— 说实话,我都没法怪智能体找到这个策略。

图 7:动图展示了“在平台下方悬停”的问题
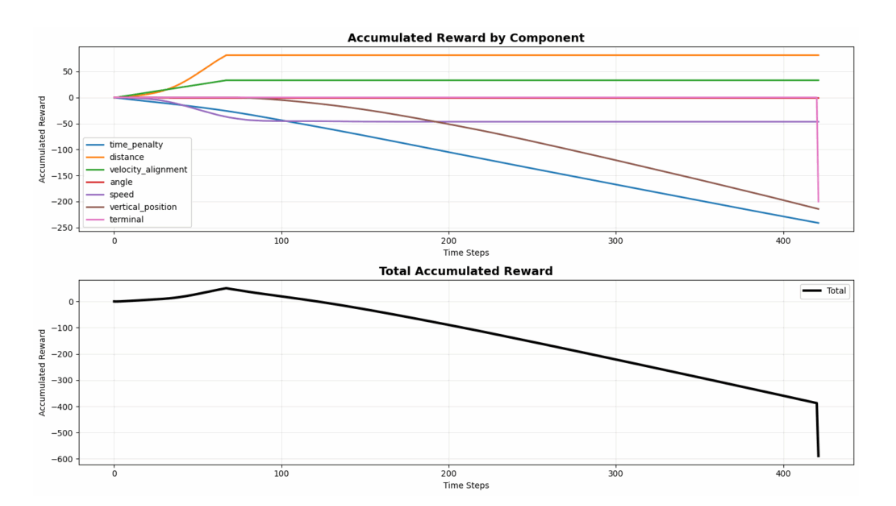
图 8:曲线显示无人机明显在进行奖励漏洞利用
图表揭示的规律如下:
- 距离奖励(橙色):前期累积到约 + 70,之后进入平台期(不再获得奖励)
- 速度对齐奖励(绿色):前期累积到约 + 30,之后进入平台期
- 时间惩罚(蓝色):稳步累积到约 – 250(惩罚持续增加)
- 垂直位置惩罚(棕色):稳步累积到约 – 200(因处于平台下方而产生的惩罚)
- 总奖励:超时后最终在 – 400 至 – 600 之间
核心结论:无人机从平台上方开始下降(下降过程中累积距离和速度奖励),经过平台高度后,并未完成着陆,而是在平台下方悬停。一旦处于平台下方,它就不再获得正奖励(注意距离和速度奖励曲线在约 50-60 步时进入平台期),但会持续累积时间惩罚和垂直位置惩罚。即便如此,这种策略依然 “可行”—— 因为尝试着陆可能面临立即 – 200 的坠毁惩罚,而在下方悬停 “仅” 会在整个回合结束时累积约 – 400 至 – 600 的惩罚(两害相权取其轻)。
为何会出现这种情况?
根本问题在于,我们的奖励函数 r (s’, a) 只能 “看到当前状态”,无法 “理解整个轨迹”(即动作序列和状态变化过程)。试想:在任意单个时间步,奖励函数无法区分以下两种情况:
- 无人机在向着陆目标推进(从上方受控下降,逐步靠近平台)
- 无人机在利用奖励规则漏洞(通过来回晃动骗取奖励)
这两种情况在某个时刻可能拥有相同的 dy_to_platform > 0(无人机在平台上方)状态,因此会获得完全相同的奖励!智能体并不 “笨”—— 它只是在严格执行你设定的优化目标(最大化奖励)而已。
如何真正解决这个问题?
要彻底解决该问题,我个人认为,奖励不应只依赖当前状态 r (s, a),而应依赖 “状态转移” r (s, a, s’)(s 为当前状态,s’ 为执行动作后的下一状态)。这样就能基于以下维度设计奖励规则:
- 进度奖励:仅当 distance (s’) < distance (s)(无人机确实在靠近平台)时,才给予奖励
- 垂直改进奖励:仅当无人机相对平台持续向上移动(逐步调整到着陆高度)时,才给予奖励
- 轨迹一致性惩罚:对表明 “来回晃动” 的快速方向变化施加惩罚
这是一种更具原则性的解决方案,而非通过不断加重惩罚来 “修补” 奖励函数(我之前尝试过用各种惩罚去修补漏洞,但效果并不好)。作弊行为之所以存在,本质上是因为我们的奖励函数缺少 “轨迹信息”。
在下一篇文章中,我将探讨 Actor-Critic 方法,以及能融入时间序列信息的技术,从而防止这类作弊策略。敬请关注!
如果您找到了解决此问题的方法,欢迎与我联系!
至此,《深度强化学习入门:从 0 到 1》这篇文章就结束了
作者:Vedant Jumle
原文链接:https://towardsdatascience.com/deep-reinforcement-learning-for-dummies/

